Flapper
Robot Fish out of water
 |
 |
 |
 |
 |
 |
 |
 |
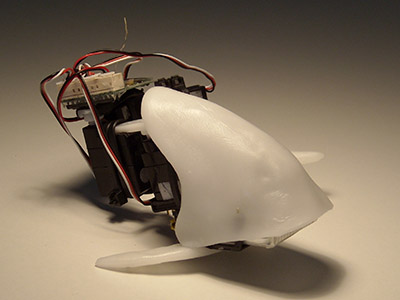
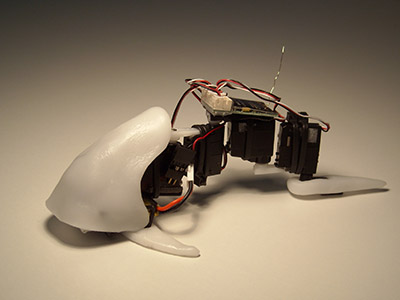
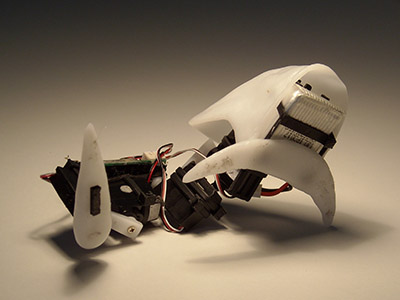
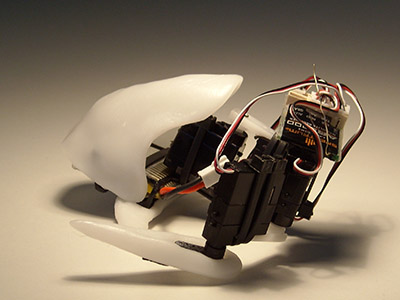
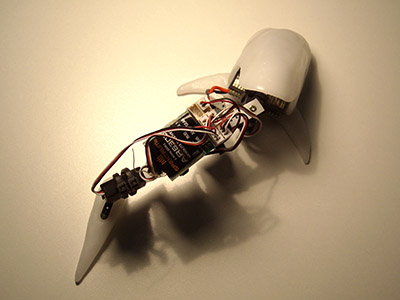
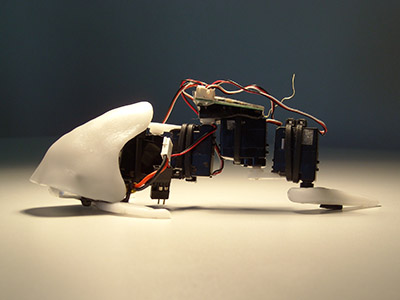
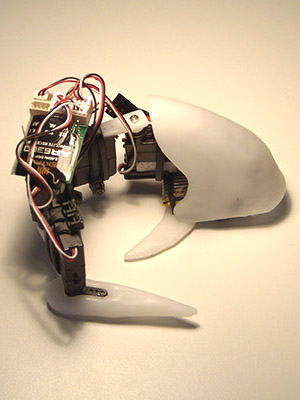
This is a 4 channel, direct servo control r/c robotic fish. I've had this idea of making a robotic
fish, originally it was going to be a swimming under water fish. 2 or 3 servos for the
body/tail, and 2 channels for controlling the fins, to tilt side to side, and up and down,
like flaperons. Rudder control would have been using the tail once momentum
and forward movement is achieved.
I decided not to tackle on the underwater fish, as water proofing and boiency would be
a nightmare to deal with. However I tackled on the mechanics of the body, using the transmitter
sticks in a circular motion to move the servos in a snake like motion. After playing around with
the mechanics, I realized I could flip it over, and back again, given how light the fish turned
out to be. Servos are sub micro Walkeras, and using a light 1s lipo, and a micro Spektrum
AR6300 receiver. As like swashbots and tortoise, no programing is involved.... motions are
accomplished only with the transmitter sticks. The white plastic parts are again made
from shapelock.
Back to Crabfu MotionWorks
Crabfu SteamWorks Crabfu Art & Animation
fish, originally it was going to be a swimming under water fish. 2 or 3 servos for the
body/tail, and 2 channels for controlling the fins, to tilt side to side, and up and down,
like flaperons. Rudder control would have been using the tail once momentum
and forward movement is achieved.
I decided not to tackle on the underwater fish, as water proofing and boiency would be
a nightmare to deal with. However I tackled on the mechanics of the body, using the transmitter
sticks in a circular motion to move the servos in a snake like motion. After playing around with
the mechanics, I realized I could flip it over, and back again, given how light the fish turned
out to be. Servos are sub micro Walkeras, and using a light 1s lipo, and a micro Spektrum
AR6300 receiver. As like swashbots and tortoise, no programing is involved.... motions are
accomplished only with the transmitter sticks. The white plastic parts are again made
from shapelock.
Back to Crabfu MotionWorks
Crabfu SteamWorks Crabfu Art & Animation
